

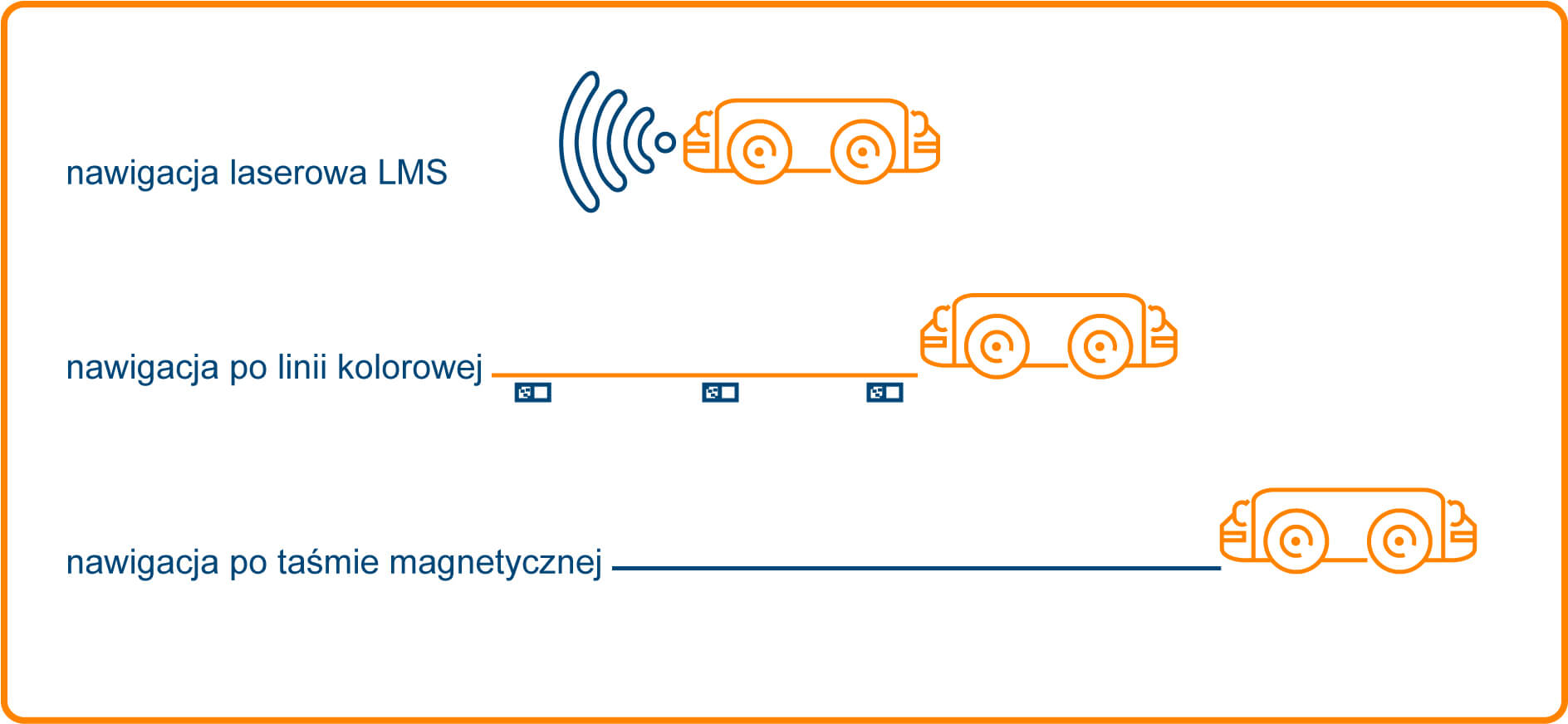
Należy rozpocząć od tego, że istnieje kilka metod nawigacji robotów w przestrzeni, z których każda ma swoje wady i zalety, w zależności od których są one mniej lub bardziej popularne.
W związku z historią wózków AGV wszyscy znają metody podążania za linią indukcyjną, magnetyczną lub kolorową. Ta ostatnia nadal jest bardzo popularna, gdyż jest to metoda dość elastyczna, szybka do wdrożenia i o dobrej relacji ceny do efektów. Prócz linii zwykle trasa oznaczona jest również kodami QR lub znacznikami RFID informującymi robota o stacjach i punktach charakterystycznych.
Obecnie najbardziej interesująca i coraz popularniejszą metodą jest nawigacja laserowa, która zapewnia samodzielność robota w przestrzeni. Firma WObit opracowała własny system nawigacji laserowej LMS (Laser Mapping System) umożliwiający autonomiczne działanie robotów mobilnych. W dalszej części wyjaśnimy co dokładnie pozwala robotom mobilnym MOBOT® AGV bez problemów orientować się w otoczeniu.
Zasada działania nawigacji laserowej tzw. free navigation
W odróżnieniu od konwencjonalnych metod, system LMS nie potrzebuje żadnych dodatkowych elementów montowanych w otoczeniu (takich jak kody, odbłyśniki itp.). Do nawigacji wykorzystywane są naturalnie występujące obiekty, takie jak ściany, maszyny, barierki, itp., których rozmieszczenie mierzone jest za pomocą skanera laserowego robota mobilnego. Informacje te służą do stworzenia wewnętrznej mapy (układu współrzędnych), w którym po wirtualnej linii będzie poruszał się robot mobilny.
Przygotowanie mapy koniecznej do lokalizacji robota jest bardzo łatwe. Aby je wykonać potrzebny jest ręczny przejazd robotem po obszarze, w którym ma pracować i zeskanowanie go przy wykorzystaniu skanerów laserowych.
Taki sposób tworzenia mapy, w odróżnieniu od systemu SLAM (Simultaneous localisation and mapping), w którym robot na bieżąco lokalizuje się na podstawie poprzednio zebranych doświadczeń, zapewnia znacznie wyższą przewidywalność działania i powtarzalność pracy. Po utworzeniu mapy, robot będzie poruszał się po niej deterministycznie, pokonując trasę zawsze w ten sam sposób, o ile w istotny sposób nie zmienią się warunki otoczenia (np. zmiana lokalizacji dużej maszyny). Taki sposób nawigacji laserowej sprawdza się zwłaszcza w fabrykach, gdzie istnieje duże natężenie ruchu różnych obiektów (np. wózków widłowych) występujących na trasie przejazdu robota, zwłaszcza w porównaniu do nawigacji z naklejoną kolorową/magnetyczną linią, która może się zabrudzić lub zniszczyć.
Autonomiczny robot mobilny MOBOT® AGV wykorzystujący system LMS do nawigacji jest szybki we wdrożeniu. Aby przygotować trasę ruchu potrzebny jest wstępny przejazd robota, podczas którego skanuje on otoczenie za pomocą skanerów laserowych z funkcją pomiaru. Dane są przekazywane do oprogramowania na PC, aby wygenerować wstępną mapę, następnie po wprowadzeniu niezbędnej korekty może ona zostać przesłana do systemu LMS, zainstalowanego na robocie. Po wczytaniu danych do oprogramowania, pod nadzorem człowieka, na mapę nanoszone są poprawki i usuwane błędy powstałe w wyniku poślizgów czy błędnej odometrii*. Ostatnim etapem procesu tworzenia mapy jest weryfikacja poprawności nawigacji, po czym robot jest gotowy do pracy. Całość zajmuje od kilku do kilkunastu godzin w zależności od wielkości trasy i złożoności otoczenia. Dokładność pozycjonowania jest uzależniona od warunków środowiskowych i w najgorszym wypadku wynosi ± 1 cm.
Jakie są korzyści daje zastosowanie nawigacji laserowej LMS?
Przede wszystkim ten sposób nawigacji zapewnia elastyczność i autonomię działania. Robot nie musi już zawsze przemieszczać się dokładnie po tej samej trasie (jak na przykład pociąg, który jedzie tylko po torach), lecz w przypadku napotkanej przeszkody może zmodyfikować trasę i ją ominąć. Porównując to do uczestników ruchu, swoboda przemieszczania jest bliższa samochodowi czy rowerzyście.
Jednocześnie autonomiczny robot mobilny zapewnia wysoki poziom bezpieczeństwa, gdyż wyposażony jest w zaawansowany, wieloczujnikowy system bezpieczeństwa. MOBOT® ma skanery laserowe przestrzeni z funkcją bezpieczeństwa, które są zgodne z normą EN ISO 13849-1. Podczas jazdy robot mobilny na bieżąco skanuje otoczenie, śledząc wszystkie zdarzenia w czasie rzeczywistym. W skanerze zaprogramowane są strefy ostrzegawcze i bezpieczeństwa, dlatego robot może odpowiednio reagować, zwalniając lub całkowicie się zatrzymując, bądź omijając przeszkodę w przypadku odpowiedniej ilości miejsca na trasie. Strefy bezpieczeństwa są automatycznie regulowane w zależności od prędkości przemieszczania się. To oznacza, że jeśli robot porusza się szybciej, strefa bezpieczeństwa będzie automatycznie dłuższa, tak aby wydłużyć drogę hamowania. Zapobiega to ewentualnym kolizjom i zapewnia bezpieczną pracę w obszarach, w którym pracują ludzie oraz inne maszyny.
Kolejną korzyścią jest wyższa efektywność kosztowa i szybszy czas zwrotu z inwestycji wynikające z większej elastyczności autonomicznych robotów mobilnych. Roboty MOBOT® AGV wyposażone w tą nawigację są szybkie we wdrożeniu i nie wymagają wprowadzania kosztownych zmian w przestrzeni fabryki. Łatwo jest też zaadaptować robota do zmian wynikających ze zmiennego procesu produkcyjnego.
*odometria to dział miernictwa, który zajmuje się pomiarem odległości. Do pomiaru drogi wykorzystujemy m.in. informacje z enkoderów umieszczonych na kołach robotów. Pozwalają one określić zmianę pozycji robota względem pozycji początkowej w czasie.
Czy artykuł cię zainteresował?
Jeśli masz jakieś pytania skontaktuj się z naszymi specjalistami.