

Na rynku dostępnych jest wiele różnych pojazdów służących do automatyzacji transportu wewnętrznego, które mają podobne funkcjonalności, natomiast bywają różnie nazywane. W tym artykule wyjaśniamy, co oznaczają poszczególne nazwy, skąd się wzięły oraz jakie są najważniejsze różnice w omawianej technologii, a także, do jakiej kategorii należą maszyny produkowane przez WObit.
Rys historyczny i systematyka nazewnictwa AGV/AMR
AGV (automated guided vehicle), czyli wózki automatyczne zostały wprowadzone do użytku już w latach 50. XX wieku. Początkowo były to pojedyncze wdrożenia, głównie w obszarze motoryzacji. Z czasem za ich pomocą zaczęto automatyzować logistykę wewnętrzną również w innych branżach.
Wraz z rozwijaniem się tej technologii pojawiły się różne typy pojazdów, różniące się pod względem sposobu podejmowania i transportu ładunku, a także metody nawigacji.
Norma ISO 3691-4:2020 nazywa wszystkie pojazdy napędzane przeznaczone do automatycznego transportu ładunków wózkami jezdniowymi bez operatora (driveless industrial truck). We wstępie do normy można przeczytać, że dotyczy to m.in. AGV, AMR, AGC (automated guided cart), tunel tugger, under cart itd.
Alfredo Pastor Tella, autor książki „What the Heck is an Automated Guided Vehicle?: Cutting non value-added Costs with Mobile Robots” przyjmuje, że wózki AGV stanowią podstawową technologię, z której wraz z rozwojem wyewoluowały różne typy urządzeń. Można by to porównać do języków, gdzie z języka indoeuropejskiego wykształciły się języki germańskie, słowiańskie czy romańskie. Dlatego wszystkie wózki jezdniowe bez operatora możemy nazwać AGV. Jednak, gdy chcemy dookreślić ich specyficzne właściwości, możemy zastosować dodatkowe nazewnictwo, które zostało wprowadzone przez producentów maszyn.
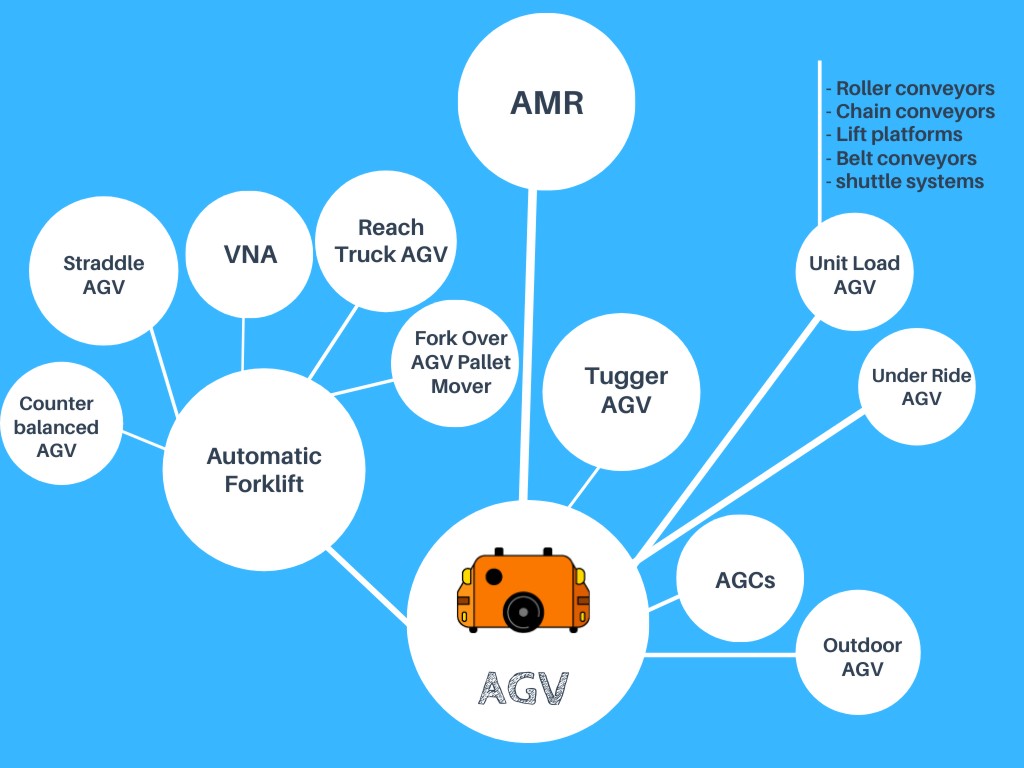
Zgodnie z systematyką podaną przez Alfredo Pastor Tella można wyróżnić następujące typy maszyn, które wykształciły się w ramach AGV:
- z podajnikiem rolkowym - z podajnikiem łańcuchowym - z podajnikiem paskowym - z platformą podnośnikową - z systemem wahadłowym |
 |
Podział wózków jezdniowych bez operatora ze względu na metody nawigacji
W przedstawionej wyżej systematyce widać podział zarówno ze względu na sposób podejmowania i transportu ładunku, miejsce zastosowania, jak i metodę nawigacji. Należy zaznaczyć, że powyższe nazwy zostały utworzone przez producentów maszyn, a Alfredo Pastor Tella je usystematyzował.
W dalszej części skoncentrujemy właśnie na podziale ze względu na sposób nawigacji, co wynika z faktu, że obecnie coraz większym zainteresowaniem na rynku cieszą się pojazdy z tzw. nawigacją naturalną, które nie wymagają fizycznej ścieżki transportowej i przemieszczają się wzdłuż dowolnej trasy.
Najpopularniejsze metody nawigacji to:
- Nawigacja punktowa magnetyczna (stosowane są małe punkty magnetyczne osadzone w podłodze),
- Nawigacja kablowa - najstarsza z metod wymagająca drutu elektrycznego osadzonego w podłodze,
- Nawigacja optyczna po linii - podążanie za kolorową taśmą lub malowaną linią na podłodze, dodatkowo oznaczana kodami QR,
- Nawigacja magnetyczna - podążanie za magnetyczną taśmą umieszczoną na podłodze, często dodatkowo oznaczaną tagami RFID,
- Nawigacja laserowa - z użyciem czujników triangulacyjnych kierowanych na odbłyśniki umieszczone na trasie LGV (laser guided vehicle),
- Nawigacja naturalna - wykorzystuje czujniki robota takie jak skanery 2D lub 3D do mapowania przestrzeni i tworzenia wirtualnej mapy. W obrębie nawigacji naturalnej wyróżnia się metodę SLAM, LIDAR bądź LMS.
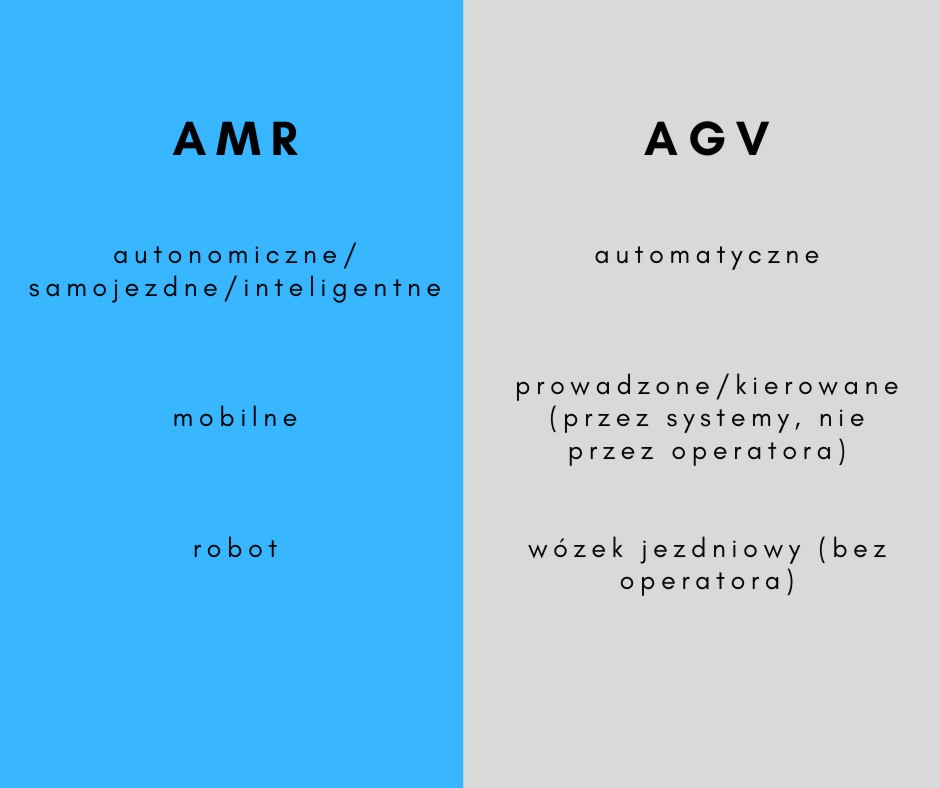
Upraszczając, wszystkie pojazdy korzystające z nawigacji, która wymaga fizycznego oznaczania trasy możemy tu nazwać AGV, natomiast korzystające z nawigacji naturalnej - AMR.
Dodatkowo wózki AMR często nazywane są inteligentnymi. Warto zaznaczyć, że określenie inteligentny, wcześniej zarezerwowane raczej dla ludzi, jednak obecnie coraz częściej stosowane w odniesieniu do urządzeń. Z łaciny słowo intelligentia oznacza zdolność pojmowania, rozumienie. W kontekście urządzeń mowa tu o urządzeniu elektronicznym, które zazwyczaj jest połączone z innymi urządzeniami i sieciami za pośrednictwem protokołów komunikacyjnych (zwykle bezprzewodowych) i może pracować w sposób interaktywny i autonomiczny (samodzielny).
W tym miejscu należy uściślić jeszcze nomenklaturę dotyczącą samych pojazdów AMR, ponieważ mniej więcej w tym samym czasie kilku producentów na świecie wprowadziło różne nazwy opisujące ten sam typ maszyn, z których najpopularniejsze to AMR, SGV, SDV, AIV.
SGV – Self Guided Vehicle (Samojezdne Kierowane/Prowadzone Wózki/Pojazdy),
SDV - Self Driving Vehicle (Samojezdne Kierowane/Prowadzone Wózki/Pojazdy)
AIV – Autonomous Intelligent Vehicle (Autonomiczne Inteligentne Wózki/Pojazdy),
AMR – Autonomous Mobile Robot (Autonomiczne Roboty Mobilne).
Pod wzgledem funkcjonalności można pomiędzy nimi postawić znak równości, dlatego dla uproszczenia w dalszej części porównania będziemy rozpatrywali różnice AGV versus AMR, zgodnie z ujednoliceniem podanym wyżej.
Porównanie technologii AGV i AMR
Najważniejsze cechy charakterystyczne wózków jezdnych AGV to:
NAWIGACJA: Odbywa się za pomocą fizycznej ścieżki wykonanej z taśmy magnetycznej/pętli indukcyjnej lub linii kolorowej. Dodatkowo punkty charakterystyczne oznaczane są za pomocą tagów RFID lub kodów QR.
WDROŻENIE: wymaga instalacji linii/punktów nawigacyjnych oraz dodatkowych oznaczeń.
ELASTYCZNOŚĆ – zmiana trasy wymaga zmiany linii nawigacyjnych oraz dodatkowych oznaczeń.
RESPONSYWNOŚĆ – ograniczona – robot przemieszcza się tylko po wyznaczonej trasie, w przypadku napotkania przeszkody, najczęściej się zatrzymuje i czeka, aż zostanie ona usunięta.
Najważniejsze cechy charakterystyczne wózków/robotów AMR to:
NAWIGACJA: urządzenie wyposażone jest w skanery 2D/ 3D, za pomocą których tworzy się mapę terenu, do czego używane są tylko naturalnie występujące obiekty takie jak ściany (dlatego ta metoda bywa nazywana naturalną nawigacją). Mając zmapowaną przestrzeń i wyznaczone punkty, do których robot ma dotrzeć, sam określa optymalną trasę.
WDROŻENIE: jest bardzo szybkie, potrzeba zmapować otoczenie, wyznaczyć punkty (zadania) w oprogramowaniu, pomiędzy którymi ma przemieszczać się pojazd i gotowe.
ELASTYCZNOŚĆ: robot analizuje zmieniające się otoczenie i dostosowuje się do niego, np. omijając przeszkody i wybierając optymalną trasę. Zmianę zadań i punktów, pomiędzy którymi ma przemieszczać się pojazd, można wykonać bardzo szybko, zaznaczając inne punkty na wirtualnej mapie, nie ma potrzeby ingerowania w fizyczną przestrzeń.
RESPONSYWNOŚĆ: robot automatycznie identyfikuje przeszkody i je omija (jeśli pozwala mu na to miejsce na trasie), wybiera też optymalną trasę do kolejnego punktu.
Robot kontra Wózek/Pojazd
W kontekście omawianych maszyn pojawia się również określenie wózek/pojazd lub robot mobilny. Wszystkie te nazwy odnoszą się do maszyny, która transportuje ładunki z punktu A do B i sterowana jest za pomocą odpowiednich układów nawigacji bez potrzeby bezpośredniej obsługi operatora.
Robot wg normy PN-EN ISO 8373:2001 jest automatycznie sterowaną, programowalną, wielozadaniową maszyną o wielu stopniach swobody, posiadającą własności manipulacyjne lub lokomocyjne. Robot mobilny określa klasę robota mogącego przemieszczać się za pomocą kół lub gąsienic.
Nazwa robot mobilny bywa stosowana dla rozróżnienia pomiędzy maszyną, a oprzyrządowaniem w postaci przyczepy, która często nazywana jest wózkiem.
Współpracujące Roboty Mobilne (CMR)
Wraz z rozwojem technologii do nomenklatury weszła jeszcze jedna nazwa - Współpracujące Roboty Mobilne (Collaborative Mobile Robots). Czym różnią się one od omówionych wcześniej wózków AGV i AMR?
Twórca1 tej nazwy i kolejnego typu robotów wskazuje, że różnica polega na interakcji z człowiekiem. Wózki jezdniowe bez operatora AGV i AMR pracują w tych samych przestrzeniach co ludzie. Wyposażone są w system bezpieczeństwa oraz system komunikatów świetlnych / dźwiękowych służących do komunikacji z otoczeniem. Jednak zazwyczaj zadania, które realizują są oddzielne od tych, które wykonują ludzie w tej samej przestrzeni. Traktują ludzi jako przeszkodę do ominięcia, a nie współpracownika.
W odróżnieniu od nich, CMR ma być bardziej wyrafinowanym i intuicyjnym robotem mobilnym, który pozwoli na faktyczną współpracę ludzi i robotów dzielących przestrzeń roboczą. Współpracujący Robot Mobilny będzie w stanie odczytywać ludzki język ciała, identyfikować i reagować na sygnały społeczne oraz przewidywać, co zrobią ich ludzcy współpracownicy.
Niezbędne do tego będzie korzystanie z takich technologii, takie jak czujniki LiDAR, kamery głębi 3D i inne czujniki, a także stosowania uczenia maszynowego i sztucznej inteligencji (AI), aby uzyskać wyraźny obraz otaczającej ich przestrzeni i zaplanować dla siebie najlepszy i najbardziej efektywny sposób wykonywania swoich zadań - jednocześnie przyjmując wskazówki od ludzi dotyczące tego, jak się zachować.
Celem jest poprawa bezpieczeństwa, elastyczności, łączności (interaktywności), łatwości wdrożenia oraz inteligencji robotów mobilnych, co zapewni rzeczywistą współpracę maszyn i ludzi, zamiast pracy obok siebie.
Bezpieczeństwo wózków jezdniowych bez operatora (AMR / AGV)
Pod względem bezpieczeństwa wszelkiego rodzaju pojazdom poruszającym się bez kierowcy stawiane są wysokie wymogi regulowane szeregiem norm. Zarówno AGV, jak i AMR są bezpieczne dzięki złożonemu systemowi czujników, systemów wizyjnych i innemu wyposażeniu. W przypadku AGV, przemieszczają się one deterministycznie po wyznaczonej trasie. Są przewidywalne dla personelu, który dokładnie wie, gdzie spotka maszyny i jaka będzie ich reakcja. W sytuacji napotkania przeszkody maszyny te po prostu się zatrzymują i czekają, aż zostanie ona usunięta, aby mogły kontynuować pracę.
Pojazdy zaliczane do AMR również wyposażone są w złożony system bezpieczeństwa, o czym szerzej w artykule poświęconym bezpieczeństwu. Maszyny te prócz unikania kolizji są o wiele bardziej elastyczne, gdyż mogą zmieniać trasy i omijać przeszkody, przemieszczając się w dynamicznym czyli zmiennym otoczeniu. Dla ludzi, którzy z nimi pracują, są bardziej nieprzewidywalne, lecz jasno informują otoczenie o wykonywanych manewrach. Służą do tego komunikaty świetlne i dźwiękowe generowane przez maszyny.
W jakich aplikacjach sprawdzą się wózki AGV i AMR?
W firmach, które rzadko się zmieniają pod względem produkowanych produktów, przepływu pracy lub siły roboczej, AGV może być dobrym rozwiązaniem. Przykładowo, jeśli na linii produkcyjnej, która produkuje materiał umieszczany w pudełku co 20 min, przez 3 zmiany dziennie – gdzie potrzeba, aby ładunek był odbierany zawsze z tego samego miejsca i dostarczany zawsze do tej samej maszyny, po co większa elastyczność? W sytuacji, gdy wymagane jest dostarczanie określonego ładunku z wyznaczonego punktu na linii montażowej i nie zmieni się to przez najbliższe 5 lat korzystniej zastosować wózek AGV.
Jeśli jednak jesteś producentem lub zarządzasz magazynem, w którym występują gwałtowne zmiany w przepływie materiałów, stanowiskach pracy lub asortymencie produktów, potrzebujesz bardziej elastycznego rozwiązania, który może się zmieniać wraz z Tobą.
Pojazdy AMR współpracują z ludźmi i są elastyczne, aby nadążać za przyszłymi możliwościami związanymi z produkcją i operacjami magazynowymi. Mogą omijać przeszkody i odciążyć pracowników od powtarzających się prac lub mało ergonomicznych, aby mogli oni skupić się na bardziej wartościowych i satysfakcjonujących zadaniach.
Co najważniejsze, łatwe w konfiguracji i obsłudze AMR umożliwiają natychmiastowy zwrot z inwestycji. Możesz szybko wdrożyć autonomicznego robota mobilnego i dostosowywać go do zmieniających się potrzeb. Elastyczność, zaawansowana nawigacja i łatwość wdrażania sprawiają, że pojazdy AMR to idealne rozwiązanie w automatyzacji dynamicznych operacji i wsparcia zespołu pracowników.
Trzecia droga - AMR / AGV
Jest jeszcze jeden aspekt, na który warto zwrócić uwagę - precyzja pozycjonowania. Zazwyczaj nawigacja laserowa oferuje precyzję pozycjonowania na poziomie 1 cm, co jest wystarczające w wielu aplikacjach. Jednak w przypadku konieczności dokowania np. do podajników rolkowych wymagana jest precyzja do 1 mm, jaką oferuje np. system nawigacji po linii kolorowej z użyciem systemu wizyjnego.
Firma WObit do takich zadań proponuje roboty wyposażone w oba rodzaje nawigacji (system AMR / AGV). Przez większość czasu robot mobilny przemieszcza się korzystając z nawigacji naturalnej, a w momencie dojazdu do podajnika czy np. stacji ładującej przełącza się na drugi system nawigacji, precyzyjnie pozycjonując się w punkcie docelowym.
Opłacalność i koszty robotów AMR i AGV
W analizie należy wziąć jeszcze pod uwagę aspekt kosztów. Pojazdy AGV same w sobie są zazwyczaj tańsze od pojazdów AMR, jednak do kosztów wdrożenia AGV należy doliczyć koszt linii kolorowej/magnetycznej i kodów QR, które muszą zostać zaimplementowane. Instalacja AMR jest zazwyczaj szybsza i tańsza, gdyż wymaga jedynie zmapowania otoczenia. Jeśli automatyzacja transportu wymaga bardzo długich tras, z wieloma punktami docelowymi lub potrzebujesz tras z wieloma opcjami, AMR stają się wygodniejsze w porównaniu z innymi technologiami, takimi jak nawigacja magnetyczna lub laserowa.
W przypadku mniej skomplikowanych instalacji, AMR mogą okazać się droższe, przynajmniej w początkowym okresie inwestycji. Jednak ich inne zalety, takie jak elastyczność mogą sprawić, że będzie to bardziej opłacalne rozwiązanie.
Wyjątkowym pod tym względem rozwiązaniem jest nowy MOBOT® TRANSPORTER – niedrogi robot mobilny typu AMR produkowany przez firmę WObit. Maszynę można samodzielnie skonfigurować przez stronę www, decydując o funkcjonalności i całkowitym koszcie, który jest znany od razu. Szczegóły tutaj.
MOBOT®
Pojazdy MOBOT® produkowane przez WObit to w większości maszyny, które należą do kategorii AMR/AIV/SGV ze względu na naturalną nawigację laserową LMS, za pomocą której nawigują się one w przestrzeni. Firma WObit przyjmuje dla nich nazwę roboty mobilne i tą nazwą posługuje się w opisie produktów.
W swojej ofercie WObit ma również dostępne pojazdy nawigowane po linii za pomocą systemu wizyjnego, które należy zaliczyć do wózków AGV.
Podsumowanie
Jak widać na rynku dostępny jest obecnie szeroki wybór pojazdów do automatyzacji transportu wewnętrznego, a także zewnętrznego. Odpowiadając na tytułowe pytanie - różnorodność nazewnictwa wynika z tworzenia go przez różnych producentów AGV/AMR i ma przede wszystkim charakter marketingowy, którego celem jest zwiększenie sprzedaży produktów.
Jaka maszyna będzie odpowiednia do Twojej aplikacji? To zależy od Twoich potrzeb i celów, które chcesz osiągnąć dzięki robotyzacji. Skontaktuj się z nami już dziś, aby dowiedzieć się więcej o tym, jak łatwe w użyciu, wytrzymałe w przemyśle i zaprojektowane pod kątem natychmiastowego działania roboty mobilne MOBOT® mogą być odpowiednie dla Twojej aplikacji.
1 Źródło: https://www.engineering.com/five-killer-features-of-collaborative-mobile-robots/
Czy artykuł cię zainteresował?
Jeśli masz jakieś pytania skontaktuj się z naszymi specjalistami.